

https://diy-project.tistory.com/19
아두이노 FPS 게임 컨트롤러 (오버워치, 더 하우스 오브 더 데드)
전에 아두이노를 이용해 에어마우스를 만들었었다. http://diy-project.tistory.com/12 이 에어마우스를 만든 직후 이를 응용해 FPS 게임컨트롤러를 제작하기 시작했고, 예상보다 오래걸린 약 2주의 제작
diy-project.tistory.com
https://diy-project.tistory.com/57
아두이노 FPS 게임 컨트롤러 2.0
시작하기에 앞서 4개월전에 올린 FPS 게임 컨트롤러에 (http://diy-project.tistory.com/19) 대해 많은 분들이 관심을 가져준 것에 대해 감사한다. 많은 분들이 댓글, 메일 등으로 해당 프로젝트에 대한
diy-project.tistory.com
어쩌다 보니 FPS 게임 컨트롤러 버전 3까지 만들게 되었다. 사실 버전 1과 버전 2는 구조적으로 큰 차이가 없었지만 버전 3은 상당한 변화가 생겼다.
첫 번째로 버전 1, 2와 달리 이제는 수신부를 필요로 하지 않고 기기와 블루투스로 연결이 가능하다. 덕분에 코드도 많이 간소화되었고 기존 nrf24l01의 고질적인 통신 문제도 해결되었다.
두 번째로 기존 조이스틱과 트리거 스위치를 제거하고 Wii의 눈차크를 사용한다. 조이스틱이랑 방아쇠 부분의 스위치는 연결 핀도 많아지고 회로가 복잡해지는 경향이 있는 듯하여 총과 가장 유사한 형태의 컨트롤러인 Wii 눈차크를 사용했다. 아두이노와 Wii 눈차크를 같이 사용하는 방법은 아래 글을 참고하자.
https://diy-project.tistory.com/113
아두이노에서 Wii 눈차크 사용하기 [Wii Nunchuck]
일본의 유명 게임회사인 닌텐도의 게임기 시리즈 중 닌텐도 Wii는 각각 3축 가속도계가 달린 Wiimote와 Wii Nunchuck을 게임 콘솔로 이용한다. (Nunchuck을 정확히 뭐라고 읽는지 애매하지만 눈차크나 넌
diy-project.tistory.com
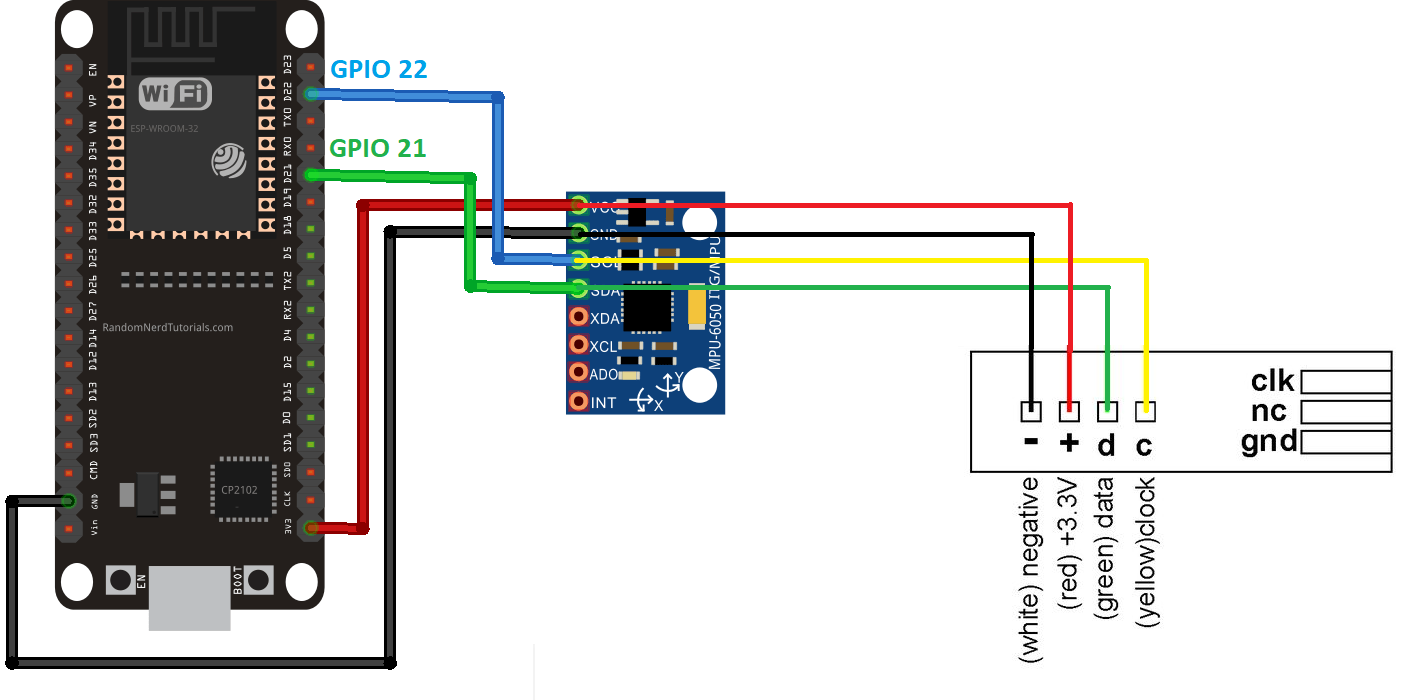
한 가지 문제는 mpu6050 자이로 센서와 Wii 눈차크 모두 I2C 통신을 사용한다는 점인데, 덕분에 코드를 작성하는데 애를 좀 먹었다. 어찌어찌 동작은 한다.
아래는 필요한 부품 리스트들이다. 알다시피 대부분의 부품들은 알리익스프레스에서 구매한다.
1. ESP-32
2513.0₩ |ESP 32S ESP WROOM 32 ESP32 ESP 32 블루투스 및 WIFI 듀얼 코어 CPU, 저전력 소모 MCU ESP 32|Integrated Cir
Smarter Shopping, Better Living! Aliexpress.com
ko.aliexpress.com
2. mpu6050
2126.0₩ 3% OFF|GY 521 GY521 GY 521 MPU 6050 MPU6050 MPU 6050 모듈 3 축 아날로그 자이로 센서 + arduino DIY 키트
Smarter Shopping, Better Living! Aliexpress.com
ko.aliexpress.com

3. Wii 눈차크
4692.0₩ 15% OFF|닌텐도 Wii 게임 컨트롤러 조이스틱 왼손 곡선 게임 핸들 컨트롤러 Nunchuk 닌텐도 Wii
Smarter Shopping, Better Living! Aliexpress.com
ko.aliexpress.com

4. Wii 눈차크 커넥터 단자
374.0₩ 5% OFF|왼쪽 컨트롤러 인터페이스 커넥터 포트가있는 WII 오른쪽 컨트롤러 소켓 링크|link|link
Smarter Shopping, Better Living! Aliexpress.com
ko.aliexpress.com

위 핵심 부품들만 있어도 동작이 가능하다. 회로는 아래와 같이 구성했다.
연결 방법은 저번 블루투스 에어마우스랑 크게 다르지 않고 Wii 눈차크 연결만 추가되었다. 버전 2와 마찬가지로 PCB를 설계했다.

PCB 주문은 언제나 그랬듯 JLCPCB를 통해 주문했다.

PCB Prototype & PCB Fabrication Manufacturer - JLCPCB
모든 단계에서 시간과 비용 절감한다. 클릭하시면 동영상을 볼 수 있습니다.
jlcpcb.com
위 링크는 현재 JLCPCB에서 한국어로 되어있는 랜딩 페이지이며 위 링크로 접속 시 새로운 한국 고객을 위해서 30달러의 쿠폰도 제공한다.


배송료를 제외하고 2달러 정도로 매우 저렴하게 구매가 가능하다. 필자가 설계한 파일은 아래 링크로 다운로드할 수 있다.


휴대용으로 제작했기 때문에 충전 회로와 배터리를 먼저 연결했다. 위 기판을 사용하는 경우 5V 전압을 출력하게 설계하면 된다. 필자는 간단하게 보조배터리 충방전 회로를 재사용했다.

그 위에 설계한 기판과 부품을 배치해 봤다. 연결 핀의 5V에 5V 입력을 주면 되고 SENS는 감도 조절용 가변 저항을 장착하면 된다. 나머지 2x6 핀들은 추가적인 버튼 착용 핀들이다. 필자는 아래 사진처럼 추가적인 버튼 3개를 연결했다. (기계식 키보드의 스위치를 사용했다.)

코드는 아래와 같다. 추가적인 핀을 사용하려면 몇 가지 수정을 해야 할 것 같다.
#include <Wire.h>
#include <SPI.h>
#include <SoftwareSerial.h>
#include <BleCombo.h>
//----------------------------------------------------//
#define ZERO_AX 530
#define ZERO_AY 530
#define ZERO_AZ 530
#define WII_NUNCHUCK_I2C_ADDRESS 0x52
int counter;
uint8_t data[6];
int16_t gyroX, gyroZ;
const int sensPin = 32;
int Sensitivity;
int delayi = 25;
uint32_t timer;
uint8_t i2cData[14];
const uint8_t IMUAddress = 0x68;
const uint16_t I2C_TIMEOUT = 1000;
uint8_t i2cWrite(uint8_t registerAddress, uint8_t* data, uint8_t length, bool sendStop) {
Wire.beginTransmission(IMUAddress);
Wire.write(registerAddress);
Wire.write(data, length);
return Wire.endTransmission(sendStop); // Returns 0 on success
}
uint8_t i2cWrite2(uint8_t registerAddress, uint8_t data, bool sendStop) {
return i2cWrite(registerAddress,&data,1,sendStop); // Returns 0 on success
}
uint8_t i2cRead(uint8_t registerAddress, uint8_t* data, uint8_t nbytes) {
uint32_t timeOutTimer;
Wire.beginTransmission(IMUAddress);
Wire.write(registerAddress);
if(Wire.endTransmission(false))
return 1;
Wire.requestFrom(IMUAddress, nbytes,(uint8_t)true);
for(uint8_t i = 0; i < nbytes; i++) {
if(Wire.available())
data[i] = Wire.read();
else {
timeOutTimer = micros();
while(((micros() - timeOutTimer) < I2C_TIMEOUT) && !Wire.available());
if(Wire.available())
data[i] = Wire.read();
else
return 2;
}
}
return 0;
}
//----------------------------------------------------//
void setup() {
Wire.begin();
Wire.beginTransmission(WII_NUNCHUCK_I2C_ADDRESS);
Wire.write(0xF0);
Wire.write(0x55);
Wire.endTransmission();
//----------------------------------------------------//
Wire.begin();
i2cData[0] = 7;
i2cData[1] = 0x00;
i2cData[3] = 0x00;
while(i2cWrite(0x19,i2cData,4,false));
while(i2cWrite2(0x6B,0x01,true));
while(i2cRead(0x75,i2cData,1));
while(i2cRead(0x3B,i2cData,6));
timer = micros();
Serial.begin(115200);
Keyboard.begin();
delay(100);
Mouse.begin();
delay(100);
}
void loop() {
Sensitivity = analogRead(sensPin);
while(i2cRead(0x3B,i2cData,14));
gyroX = ((i2cData[8] << 8) | i2cData[9]);
gyroZ = ((i2cData[12] << 8) | i2cData[13]);
gyroX = gyroX / Sensitivity / 1.1 * -1;
gyroZ = gyroZ / Sensitivity * -1;
Wire.requestFrom(WII_NUNCHUCK_I2C_ADDRESS, 6);
counter = 0;
while(Wire.available()){
data[counter++] = Wire.read();
}
Wire.beginTransmission(WII_NUNCHUCK_I2C_ADDRESS);
Wire.write(0x00);
Wire.endTransmission();
if(counter >= 5){
int SX = data[0];
int SY = data[1];
double AX = ((data[2] << 2) + ((data[5] >> 2) & 0x03) - ZERO_AX);
double AY = ((data[3] << 2) + ((data[5] >> 4) & 0x03) - ZERO_AY);
double AZ = ((data[4] << 2) + ((data[5] >> 6) & 0x03) - ZERO_AZ);
int BC =(data[5] >> 1) & 0x01;
int BZ = data[5] & 0x01;
Serial.print(BC);
Serial.print(" ");
Serial.print(BZ);
Serial.print(" ");
Serial.print(SX);
Serial.print(" ");
Serial.print(SY);
Serial.print(" ");
Serial.print(gyroX);
Serial.print(" ");
Serial.print(gyroZ);
Serial.print("\r\n");
if(Keyboard.isConnected()) {
Mouse.move(gyroZ, gyroX);
if (BC == 0) {
Mouse.press(MOUSE_LEFT);
}
else {
Mouse.release(MOUSE_LEFT);
}
if (BZ == 0) {
Mouse.press(MOUSE_RIGHT);
}
else {
Mouse.release(MOUSE_RIGHT);
}
if (SX > 170) {
Keyboard.press('d');
}
else if (SX < 70) {
Keyboard.press('a');
}
else if (SY > 170) {
Keyboard.press('w');
}
else if (SY < 70) {
Keyboard.press('s');
}
else {
Keyboard.releaseAll();
}
}
}
delay(delayi);
}
사용된 라이브러리는 블루투스 에어마우스랑 비슷한데 추가로 키보드, 마우스 콤보 라이브러리를 사용했다.
https://github.com/ServAlex/ESP32-BLE-Combo
GitHub - ServAlex/ESP32-BLE-Combo: Bluetooth LE Keyboard/Mouse Combo library for the ESP32 (Arduino IDE compatible)
Bluetooth LE Keyboard/Mouse Combo library for the ESP32 (Arduino IDE compatible) - GitHub - ServAlex/ESP32-BLE-Combo: Bluetooth LE Keyboard/Mouse Combo library for the ESP32 (Arduino IDE compatible)
github.com
아래는 작동 영상이다. 같이 비교해보면 좋을 것 같아 버전 1, 2의 영상도 넣었다.
[버전 1]
https://www.youtube.com/watch?v=dkw_3YOvp6A&ab_channel=WanderingDragon
[버전 2]
https://www.youtube.com/watch?v=aFOWWeR_Nek&ab_channel=WanderingDragon
[버전 3]
https://www.youtube.com/watch?v=tvRXFyJaSOE&ab_channel=WanderingDragon
오락실에서 자주 보이는 The House of The Dead 4를 플레이해봤다. 에뮬레이터 버전인데 설치 방법은 아래 글을 참고했다.
https://gall.dcinside.com/mgallery/board/view/?id=hotdm&no=354
하오데4 PC로 하기 - 하우스 오브 더 데드 마이너 갤러리
우선 준비여기를 눌러서 에뮬+롬파일 포함된거 받아주셈.(파일 다시 올렸습니다.)그런다음 압축을 풀어주는데,~~~에 압축풀기 말고 '여기에 압축풀기'로 해주세요.그러면 파일이 이렇게 나올거
gall.dcinside.com

'프로젝트 > FPS 게임 컨트롤러' 카테고리의 다른 글
| 아두이노 블루투스 에어마우스 만들기 (6) | 2022.06.19 |
|---|---|
| 아두이노 FPS 게임 컨트롤러 2.0 게임 테스트 (5) | 2018.10.07 |
| FPS 게임 컨트롤러 수신기 PCB 발주 (0) | 2018.10.04 |
| 모바일 배틀그라운드 컨트롤러 만들기 [아두이노 FPS 게임컨트롤러 활용] (4) | 2018.09.25 |
| 아두이노 FPS 게임 컨트롤러 수신부 업그레이드 중 (0) | 2018.09.22 |